CLI Tool for bldc motor
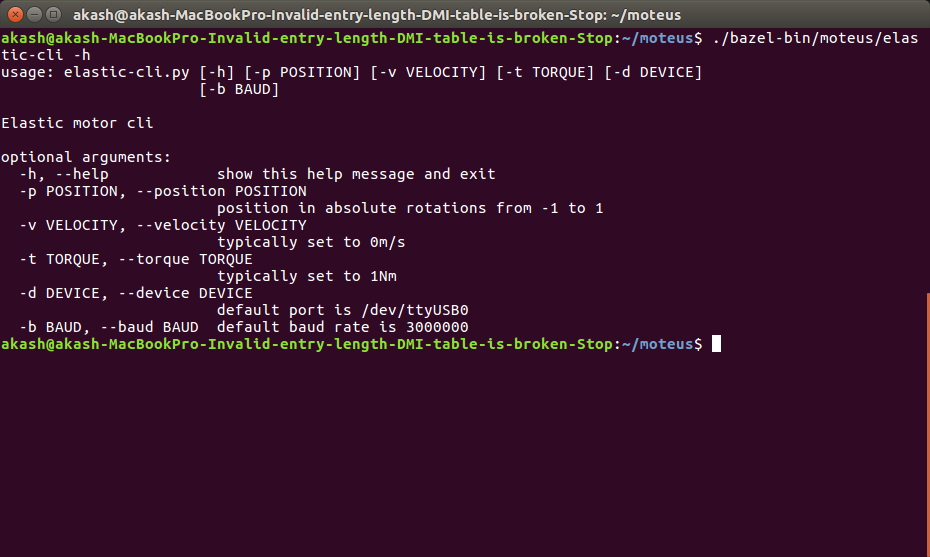
To simplify working with the motor controller, I wrote a command line tool in python to command position, velocity and torque.
$ python elastic-cli [--target -f, --baud, --set-id]
To simplify working with the motor controller, I wrote a command line tool in python to command position, velocity and torque.
$ python elastic-cli [--target -f, --baud, --set-id]